비돌극 동기 발전기의 극한 전력은 식(1)이 최대가 되는 각도 즉, δm=90∘로 정태안정극한 전력(static power limit)이라 한다.
돌극 동기 발전기의 극한 전력은 식(2)가 최대가 되는 각도로 δm=60∘가 된다.
부하각에 따른 전력의 변화는 다음과 같다.
0<δ<δm사이는 P는 δ에 따라 증가한다.
δ>δm일때 δ가 증가할수록 P는 감소한다.
난조(Hunting)
현상
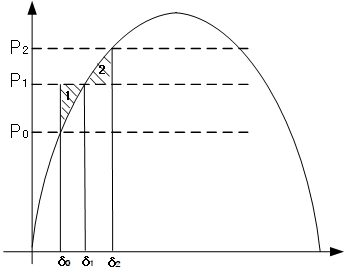
내부 기전력과 단자 전압이 일정하다고 가정한다. 이때 Po에 상당하는 부하각은 δo이다.
동기기의 출력이 P1으로 증가하면 증가된 전력량에 해당하는 만큼 부하각이 증가한다. 즉, Po→P1⇒δo→δ1가 된다.
부하가 갑자기 증가하면 원동기의 조속기가 즉시 동작해서 발전기 입력을 증가해야되나 조속기가 동작하기까지 시간이 다소 걸린다. 이 순간 P1−Po에 상당하는 전력이 부족해진다. 동기기는 회전체에 축적한 운동에너지를 방출하여 전력을 보충한다. 회전자의 속도가 떨어지고 상차각이 증가하게 된다.
상차각의 이동속도는 δ0에서 영이고 δ1에서 최대가 된다. 회전자 관성 때문에 δ1에서 평형을 유지 못하고 더 이동하여 δ>δ1가 된다.
δ2에 이르러 상차각 증가가 멈추었을 때를 보면 출력 전력P2>P1가 되어 남는 전력은 회전체의 속도를 증가시켠 상차각이 줄어들게 된다. δ2에서 δ1으로 향해 이동하기 시작한다. 몇 번의 진동후 δ1에서 정지하게 된다.
그래프로 살펴보면 1의 면적과 같은 2의 면적이 되는 δ2까지 난조(왔다갔다)하다 P1에 정지한다.
1의 면적과 같은 2의 면적을 만들 수 없으면 가속작용으로 방출한 에너지를 회수할 수 없어서 탈조된다.
난조가 심하면 발전기에서 공급하는 부하가 작아진다. 이는 난조 때문에 극한 전력을 돌파하는 일이 일어나기 쉽기 때문이다.
동기기가 난조하기않고 계속 운전할 수 있는 출력의 한도를 과도안정극한 전력이라 한다.
순간적으로 부하가 증가 → 속도가 일시적으로 떨어짐 → 관성 → 부하각이 필요 이상 증가 → 여분의 전력 → 회전자 가속 → 부하각 감소 → … (진동 발생)난조 → 공진 현상 → 운전 불가능 → 탈조
디젤발전기같이 원동기의 회전력이 주기적으로 변화하는 경우에는 주기가 난조의 주기에 접근하게 되면 공진이 생겨 진폭이 증대하여 발전기는 정지
난조 방지 → 제동 권선
평균 속도는 동기속도이지만 순시속도는 변한다. 유도전류가 제동 역할하여 진폭이 점차 줄어 δ2가 된다.
δ+γ에서 δ로 돌아오려는 회전력은 동기화 회전력과 제동회전력이 된다.
∑T=Jdt2d2γ(관성모먼트)
동기화 회전력 :
T=ωxsVE[sin(δ+γ)−sinδ]=(ωxsVEcosδ)γ=kγ(1)
sin(δ+γ)−sinδ=sinδcosγ+cosδsinγ−sinδ(2)
δ가 매우 작으면 sinγ≒γ , cosγ≒1으로 근사화하면 식(2)는 식(3)과 같아진다.
sin(δ+γ)−sinδ≒γcosδ(3)
제동회전력은 Td=Ddtdγ이다. 여기서, D는 제동계수이다.
γ에 대한 난조 방정식:
Jdt2d2γ+Ddtdγ+kγ=0
γ=Aeαt+Beβt
α=2J−D+D2−4kJ
β=2J−D−D2−4kJ
D2−4kJ>0 : 진동이 안생김
D2−4kJ<0 : 난조가 일어남
γ=e−2JDt⎝⎛AejJk−4J2D2t+Be−jJk−4J2D2t⎠⎞
진동 주파수 f=2π1Jk−4J2D2 는 e−2JDt의 지수함수 곡선에 따라서 감쇠함.
제동작용이 없는 고유진동주파수 f0=2π1ωxJmVEcosδ
난조의 원인
동요가 심하면 발전기 자체가 동요하게되어 동기화력도 커지고 전류 및 전력이 크게 변화한다.
원인
원동기 조속기의 감도가 너무 예민한 경우
원동기 회전력에 고주파가 포함된 경우
전기자 회로의 저항이 큰 경우
방지법
제동권선을 설치해서 제동계수 D를 크게
회전자의 관성 J 를 적당
제동권선
자극 위에 축방향으로 도체를 설치하고 이들을 양끝에서 단락시킨 것이 **제동권선(damper winding)**이다.
회전자가 동기속도로 회전하면 전기자회전기자력과의 상대 속도는 0이되어 제동권선에 전류가 흐르지않는다.
회전자에 난조가 발생하면 순간적으로 동기를 이탈하면 제동권선은 전기자반작용자속을 절단해서 전류가 흐르게 되고 제동권선에 전류가 흘러 제동 작용을 한다.
부하각이 진동하면서 동기속도 위 아래로 변동할 때는 제동권선에 기전력이 유기되고, 유도전류가 흘러 토크를 발생한다.
이 토크는 회전자가 동기속도보다 빠르건 늦건 상대속도를 줄이는 쪽으로 항상 회전자를 동기속도에 일치시키려는 방향으로 작용한다.
속도 차이를 억제하여 진동을 빨리 감쇠시키는 효과를 갖는다.
진동에너지는 제동권선에서 유도전류가 발생하는 주울열로 소모된다.
진동성분에만 선택적으로 작용하는 브레이크의 마찰열과 같으며, '제동'이란 표현은 여기서 비롯된것
로그인 하면 댓글을 쓸 수 있습니다.